El sensor d’inductància sense contacte es col·loca com un sensor capaç de reaccionar a objectes metàl·lics atrapats en el seu camp electromagnètic. Gràcies a aquesta propietat dels sensors de proximitat inductius, és possible fer un seguiment del moviment de les parts mòbils de l’equip i, si cal, apagar el motor del mecanisme d’acció. Per reconèixer i analitzar els canvis en el camp magnètic, s’introdueix a la seva composició una unitat electrònica especial anomenada controlador (comparador).
Dispositiu i principi de funcionament

Els sensors de posició d’inducció, a més d’un comparador electrònic, contenen els components obligatoris següents:
- caixa d'acer amb connector per connectar el cable;
- un element sensible incorporat que registra els canvis en el camp magnètic es realitza en forma de nucli d’acer amb una bobina;
- mòdul de relé executiu;
- indicador d'activació del LED.
El disseny de diferents models de sensors metàl·lics pot tenir algunes diferències. No afecten el propi sensor d’inducció, ja que el principi del seu funcionament no canvia.

D'acord amb el dispositiu del dispositiu, l'essència del seu funcionament es descriu de la manera següent:
- el moviment de la part metàl·lica de l’objecte controlat comporta un canvi en la inductància de l’element sensible del sensor;
- la desviació s’explica per la distorsió del seu camp magnètic, el resultat del qual és un canvi en els paràmetres del circuit elèctric i la seva activació (el LED s’encén);
- després, el mòdul electrònic s'activa i envia un senyal al dispositiu executiu;
- quan es rep un impuls per sobrepassar el límit permès per moviment, el node de sortida (relé) desconnecta l'equip de la xarxa.
Cada model té la seva pròpia bretxa de sensibilitat al moviment. Per a diferents mostres, aquest paràmetre varia d'1 micra a 20 mil·límetres.
Paràmetres del sensor inductiu

A més del rang de resposta o sensibilitat, un sensor inductiu es caracteritza pels següents indicadors de rendiment:
- La mida (diàmetre) del fil d'aterratge, per a diverses mostres, prenent valors de 8 a 30 mm.
- Tensió d'alimentació nominal a una temperatura de més de 20 graus, fins a 90 volts de corrent continu i fins a 230 volts - corrents alterns.
- Longitud total del cos: el seu valor depèn de la tensió de funcionament.
Aquest darrer indicador per a diferents mostres pot variar significativament.
Per a la zona sensible o activa del dispositiu, s’introdueix un altre paràmetre, anomenat límit de resposta garantit. El seu límit inferior és zero i el superior és del 80% del valor nominal. De vegades, aquest indicador s’anomena factor de correcció del joc lliure.
Un indicador igualment important de la funcionalitat d’un dispositiu sensible és el nombre de cables de connexió del connector. Normalment n'hi ha dos o tres: dos de subministrament i un per activar el circuit. No obstant això, són possibles les opcions de connexió en la disposició de les quals s’utilitzen quatre o cinc punts de contacte. Mostres similars, a més de dos conductors de subministrament, contenen dues sortides a la càrrega. En aquest cas, el cinquè conductor s’utilitza per seleccionar el mode de funcionament del propi dispositiu.
Tipus de sortides i mètodes de connexió
Per avaluar l'acció d'un dispositiu sensible, s'introdueix una característica especial, avaluada per l'estat de la polaritat dels seus paràmetres de sortida. D'acord amb la designació generalment acceptada d'elements semiconductors (transistors) inclosos en el circuit electrònic del sensor, aquestes sortides s'anomenen "PNP" i "NPN".
La diferència entre aquests noms és que denoten diferents polaritats (pols) de la font d'alimentació dels dispositius sensibles. Els transistors PNP canvien la seva sortida positiva i el NPN és negatiu. La càrrega dels circuits de sortida sol ser el microprocessador de control.
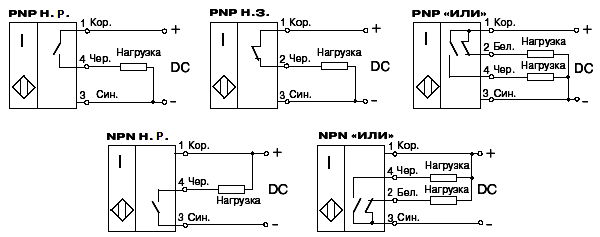
Depenent de l'esquema de control del controlador, els sensors inductius es designen com HO (normalment oberts) o HZ, amb una entrada normalment tancada.
L'opció de transistor NPN és la forma més habitual d'encendre el sensor, ja que els circuits estàndard fan que el cable negatiu sigui comú a tots els components. En aquest cas, les entrades de microprocessadors i altres dispositius de control s’activen amb una tensió positiva.
Marcatge de connexió
En els diagrames esquemàtics, els sensors inductius solen denotar-se com un rombe o quadrat amb dues línies verticals al seu interior. Sovint també indiquen el tipus de sortida (normalment oberta o tancada), que correspon a una de les varietats de transistors semiconductors. La majoria d’opcions de circuits indiquen un grup normalment tancat o els dos tipus en el mateix allotjament.
Codificació de colors de plom

A la pràctica, s’utilitza un sistema estàndard de marcar els cables dels sensors d’inductància, que tots els fabricants de dispositius sensibles compleixen sense excepció. No obstant això, abans d’instal·lar-los, es recomana observar acuradament la polaritat de la connexió i assegurar-se de comprovar les instruccions subministrades amb els productes.
Tots els sensors tenen un dibuix de filferro amb codis de colors als seus allotjaments, si la mida ho permet.
Ordre de designació estàndard:
- blau (blau) sempre significa un carril de potència negatiu;
- color marró (marró) indica un conductor positiu;
- negre (negre) correspon a la sortida del sensor;
- El blanc és una entrada o entrada auxiliar.
Per aclarir l’última designació de marcatge, s’ha de comparar amb les dades de les instruccions adjuntes al dispositiu específic.
Errors del sensor

L'error en prendre lectures del sistema de control afecta significativament el funcionament del sensor inductiu sense contacte. El seu valor total es recull a partir d’errors de mesura individuals per a diversos indicadors: electromagnètics, de temperatura, de maquinari, d’elasticitat magnètica i molts altres.
L’error electromagnètic es defineix com una quantitat que es produeix aleatòriament. Apareix a causa d’una CEM parasitària induïda a la bobina pels camps magnètics externs. En un entorn de producció, aquest component és creat per equips de potència amb una freqüència de funcionament de 50 Hz. L’error de temperatura és un dels indicadors més importants, ja que la majoria dels sensors només poden funcionar en un interval de temperatura determinat. S’ha de tenir en compte a l’hora de dissenyar dispositius d’aquesta classe.
L’error d’elasticitat magnètica s’introdueix com a indicador de la inestabilitat de les deformacions del nucli que es produeix durant el muntatge del dispositiu, així com el mateix factor, però que es manifesta durant el seu funcionament. La inestabilitat de les tensions internes del circuit magnètic condueix a errors en el processament del senyal de sortida. L'error que es produeix al dispositiu més sensible apareix a causa de la influència de l'estructura del camp sobre el coeficient de deformació dels elements metàl·lics del sensor. A més, el seu valor total es veu significativament afectat per la reacció i els jocs a les parts mòbils de l’estructura.
L'error del cable de connexió es deu a les desviacions del valor de resistència dels seus nuclis de fil en funció del factor de temperatura, així com a la inducció de camps electromagnètics externs i EMF. L'error del calibrador de tensió com a variable aleatòria depèn de la qualitat de fabricació dels elements de bobinatge del sensor (les seves bobines, en particular). En diverses condicions de funcionament, és possible canviar la resistència de corrent continu del bobinatge, donant lloc al "flotant" del senyal de sortida. L’error d’envelliment es manifesta a causa del desgast dels elements mòbils del sensor, així com de canvis en les propietats electromagnètiques del circuit magnètic.
És possible comprovar el valor real d’aquest paràmetre només amb l’ajut d’instruments de mesura ultra precisos. En aquest cas, cal tenir en compte les característiques cinemàtiques del sensor. A l’hora de dissenyar i fabricar elements sensibles, aquesta possibilitat es té en compte per endavant en el seu disseny.
Els sensors inductius i capacitius es caracteritzen per modes de funcionament amb molts factors d’influència, determinats per condicions de funcionament específiques. Per això, l'elecció de la sensibilitat i un conjunt de paràmetres de sortida adequats per a una marca de dispositiu determinant és decisiva a l'hora d'utilitzar-lo com a interruptor de límit.







