Den kontaktløse induktanssensor er placeret som en sensor, der er i stand til at reagere på metalgenstande fanget i dets elektromagnetiske felt. Takket være denne egenskab ved induktive nærhedssensorer er det muligt at spore bevægelsen af bevægelige dele af udstyret og om nødvendigt slukke for drivmekanismens motor. For at genkende og analysere ændringer i magnetfeltet introduceres en speciel elektronisk enhed kaldet en controller (komparator) i deres sammensætning.
Enhed og funktionsprincip

Induktionspositionssensorer ud over en elektronisk komparator indeholder følgende obligatoriske komponenter:
- stålhus med stik til tilslutning af ledning;
- et indbygget følsomt element, der registrerer ændringer i magnetfeltet, er lavet i form af en stålkerne med en spole;
- udøvende relæmodul;
- aktiveringsindikator på lysdioden.
Udformningen af forskellige modeller af metalsensorer kan have nogle forskelle. De påvirker ikke selve induktionssensoren, princippet om dens drift ændres ikke fra dette.

I overensstemmelse med enhedens enhed er essensen af dens funktion beskrevet som følger:
- bevægelse af metaldelen af den kontrollerede genstand fører til en ændring i induktansen af det følsomme element i sensoren;
- afvigelsen forklares ved forvrængningen af dens magnetfelt, hvilket resulterer i en ændring i parametrene for det elektriske kredsløb og dets aktivering (LED'en lyser);
- derefter udløses det elektroniske modul og sender et signal til den udøvende enhed;
- når en impuls modtages omkring overskridelse af den tilladte grænse ved bevægelse, afbryder output (relæ) -noden det overvågede udstyr fra netværket.
Hver model har sin egen bevægelsesfølsomhed - forskudt hul. For forskellige prøver varierer denne parameter fra 1 mikron til 20 millimeter.
Induktive sensorparametre

Ud over responsområdet eller følsomheden er en induktiv sensor karakteriseret ved følgende præstationsindikatorer:
- Landingstrådens størrelse (diameter) for forskellige prøver med værdier fra 8 til 30 mm.
- Nominel forsyningsspænding ved en temperatur på plus 20 grader, op til 90 Volt DC og op til 230 Volt - AC-strøm.
- Samlet kropslængde - dens værdi afhænger af driftsspændingen.
Den sidstnævnte indikator for forskellige prøver kan variere markant.
For enhedens følsomme eller aktive zone introduceres en anden parameter, kaldet den garanterede reaktionsgrænse. Dens nedre grænse er nul, og den øvre er 80 procent af den nominelle værdi. Denne indikator kaldes undertiden korrektionsfaktoren for arbejdsafstand.
En lige så vigtig indikator for en følsom enheds funktionalitet er antallet af tilslutningsledninger i stikket. Normalt er der to eller tre af dem: to forsyninger og en til aktivering af kredsløbet. Forbindelsesmuligheder er dog mulige, hvis arrangement der anvendes fire eller fem kontaktpunkter. Lignende prøver indeholder foruden to forsyningsledere to udgange til belastningen. I dette tilfælde bruges den femte leder til at vælge selve enhedens driftstilstand.
Typer af udgange og forbindelsesmetoder
For at vurdere virkningen af en følsom enhed introduceres en særlig egenskab evalueret af tilstanden af polariteten af dens outputparametre. I overensstemmelse med den generelt accepterede betegnelse af halvlederelementer (transistorer) inkluderet i sensorens elektroniske kredsløb kaldes disse udgange "PNP" og "NPN".
Forskellen mellem disse navne er, at de angiver forskellige polariteter (poler) i strømforsyningen til følsomme enheder. PNP-transistorer skifter sin positive output, og NPN - negativ. Belastningen på outputkredsløbene er ofte kontrolmikroprocessoren.
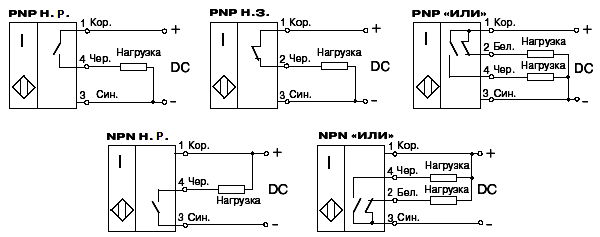
Afhængig af styringsskemaet for controlleren betegnes induktive sensorer som HO (normalt åben) eller HZ - med en normalt lukket indgang.
NPN-transistorindstillingen er den mest almindelige måde at tænde sensoren på, da standardkredsløb gør den negative ledning fælles for alle komponenter. I dette tilfælde aktiveres indgangene fra mikroprocessorer og andre overvågningsenheder med en positiv spænding.
Forbindelsesmarkering
På skematiske diagrammer betegnes induktive sensorer normalt som en rombe eller firkant med to lodrette linjer indeni. Ofte angiver de også typen af output (normalt åben eller lukket) svarende til en af varianterne af halvledertransistorer. De fleste kredsløbsindstillinger angiver en normalt lukket gruppe eller begge typer i samme hus.
Blyfarvekodning

I praksis anvendes et standardsystem til mærkning af ledningerne til induktanssensorer, der overholdes af alle producenter af følsomme enheder uden undtagelse. Ikke desto mindre anbefales det, før du installerer dem, nøje at observere forbindelsens polaritet og sørge for at kontrollere de instruktioner, der følger med produkterne.
Alle sensorer har en farvekodet ledningstegning på deres huse, hvis størrelsen tillader det.
Standard rækkefølge for betegnelse:
- blå (blå) betyder altid negativ motorskinne;
- brun farve (brun) betegner en positiv leder;
- sort (sort) svarer til sensorudgangen;
- Hvid er en ekstraudgang eller input.
For at afklare den sidste markeringsbetegnelse skal den kontrolleres i forhold til dataene i instruktionerne, der er knyttet til den specifikke enhed.
Sensorfejl

Fejlen ved aflæsning af kontrolsystemet påvirker betydeligt driften af den berøringsfri induktive sensor. Dens samlede værdi indsamles fra individuelle målefejl til forskellige indikatorer: elektromagnetisk, temperatur, hardware, magnetisk elasticitet og mange andre.
Elektromagnetisk fejl defineres som en tilfældigt forekommende størrelse. Det ser ud på grund af en parasitisk EMF induceret i spolen af eksterne magnetfelter. I et produktionsmiljø er denne komponent skabt af strømudstyr med en driftsfrekvens på 50 Hertz. Temperaturfejl er en af de vigtigste indikatorer, da de fleste sensorer kun kan arbejde i et bestemt temperaturområde. Det skal tages i betragtning ved design af enheder i denne klasse.
Fejlen ved magnetisk elasticitet introduceres som en indikator for ustabiliteten af kernedeformationer, der opstår under enhedens samling, såvel som den samme faktor, men manifesterer sig under dens drift. Ustabiliteten af interne spændinger i det magnetiske kredsløb fører til fejl i behandlingen af udgangssignalet. Fejlen, der opstår i den mest følsomme enhed, vises på grund af markstrukturens indflydelse på deformationskoefficienten for sensorelementets metalelementer. Derudover påvirkes dets samlede værdi markant af tilbageslag og frigørelser i konstruktionens bevægelige dele.
Forbindelseskablets fejl er taget fra afvigelser af modstandsværdien af dets ledere, afhængigt af temperaturfaktoren, samt induktion af fremmede elektromagnetiske felter og EMF. Tøjspændingsfejlen som en tilfældig variabel afhænger af fremstillingskvaliteten af sensorens viklingselementer (især dens spoler). Under forskellige driftsforhold er en ændring i DC-modstanden af viklingen mulig, hvilket fører til "svævningen" af udgangssignalet. Aldringsfejlen manifesteres på grund af slid på sensorens bevægelige elementer samt ændringer i det magnetiske kredsløbs elektromagnetiske egenskaber.
Det er muligt at kontrollere den reelle værdi af denne parameter kun ved hjælp af ultrapræcise måleinstrumenter. I dette tilfælde skal de kinematiske egenskaber ved selve sensoren tages i betragtning. Ved design og fremstilling af følsomme elementer tages denne mulighed på forhånd i betragtning i dens design.
Induktive og kapacitive sensorer er kendetegnet ved driftsformer med mange påvirkningsfaktorer bestemt af specifikke driftsforhold. Derfor er valget af følsomhed og et sæt outputparametre, der passer til et givet mærke enhed, afgørende, når det bruges som en endestop.







