El sensor de inductancia sin contacto se posiciona como un sensor capaz de reaccionar a objetos metálicos atrapados en su campo electromagnético. Gracias a esta propiedad de los sensores de proximidad inductivos, es posible rastrear el movimiento de las partes móviles del equipo y, si es necesario, apagar el motor del mecanismo de accionamiento. Para reconocer y analizar los cambios en el campo magnético, se introduce en su composición una unidad electrónica especial llamada controlador (comparador).
Dispositivo y principio de funcionamiento.

Los sensores de posición de inducción, además de un comparador electrónico, contienen los siguientes componentes obligatorios:
- caja de acero con conector para cable de conexión;
- un elemento sensible incorporado que registra los cambios en el campo magnético se realiza en forma de un núcleo de acero con una bobina;
- módulo de relé ejecutivo;
- indicador de activación en el LED.
El diseño de diferentes modelos de sensores metálicos puede tener algunas diferencias. No afectan al sensor de inducción en sí, el principio de su funcionamiento no cambia a partir de esto.

De acuerdo con el dispositivo del dispositivo, la esencia de su funcionamiento se describe a continuación:
- mover la parte metálica del objeto controlado conduce a un cambio en la inductancia del elemento sensible del sensor;
- la desviación se explica por la distorsión de su campo magnético, cuyo resultado es un cambio en los parámetros del circuito eléctrico y su activación (el LED se enciende);
- después de eso, el módulo electrónico se activa y envía una señal al dispositivo ejecutivo;
- cuando se recibe un pulso acerca de exceder el límite permitido por movimiento, el nodo de salida (relé) desconecta el equipo monitoreado de la red.
Cada modelo tiene su propia sensibilidad al movimiento: espacio de compensación. Para diferentes muestras, este parámetro varía de 1 micrón a 20 milímetros.
Parámetros del sensor inductivo

Además del rango de respuesta o sensibilidad, un sensor inductivo se caracteriza por los siguientes indicadores de rendimiento:
- El tamaño (diámetro) del hilo de aterrizaje, para varias muestras, tomando valores de 8 a 30 mm.
- Tensión de alimentación nominal a una temperatura de más 20 grados, hasta 90 Voltios DC y hasta 230 Voltios - corrientes alternas.
- Longitud total del cuerpo: su valor depende del voltaje de funcionamiento.
El último indicador para diferentes muestras puede variar significativamente.
Para la zona sensible o activa del dispositivo, se introduce otro parámetro, llamado límite de respuesta garantizado. Su límite inferior es cero y el superior es el 80 por ciento del valor nominal. Este indicador a veces se denomina factor de corrección de la holgura de trabajo.
Un indicador igualmente importante de la funcionalidad de un dispositivo sensible es la cantidad de cables de conexión en el conector. Habitualmente hay dos o tres de ellos: dos de alimentación y uno para activar el circuito. Sin embargo, son posibles opciones de conexión en cuya disposición se utilizan cuatro o cinco puntos de contacto. Muestras similares, además de dos conductores de suministro, contienen dos salidas a la carga. En este caso, el quinto conductor se utiliza para seleccionar el modo de funcionamiento del propio dispositivo.
Tipos de salidas y métodos de conexión
Para evaluar la acción de un dispositivo sensible, se introduce una característica especial, evaluada por el estado de la polaridad de sus parámetros de salida. De acuerdo con la designación generalmente aceptada de los elementos semiconductores (transistores) incluidos en el circuito electrónico del sensor, estas salidas se denominan "PNP" y "NPN".
La diferencia entre estos nombres es que denotan diferentes polaridades (polos) de la fuente de alimentación de dispositivos sensibles. Los transistores PNP cambian su salida positiva y NPN - negativa. La carga de los circuitos de salida suele ser el microprocesador de control.
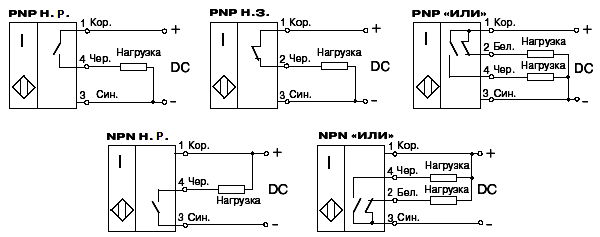
Dependiendo del esquema de control del controlador, los sensores inductivos se designan como HO (normalmente abiertos) o HZ, con una entrada normalmente cerrada.
La opción de transistor NPN es la forma más común de encender el sensor, ya que los circuitos estándar hacen que el cable negativo sea común a todos los componentes. En este caso, las entradas de microprocesadores y otros dispositivos de monitoreo se activan con un voltaje positivo.
Marcado de conexión
En los diagramas esquemáticos, los sensores inductivos generalmente se indican como un rombo o un cuadrado con dos líneas verticales en el interior. A menudo también indican el tipo de salida (normalmente abierta o cerrada), correspondiente a una de las variedades de transistores semiconductores. La mayoría de las opciones de circuito indican un grupo normalmente cerrado o ambos tipos en la misma carcasa.
Codificación de colores de plomo

En la práctica, se utiliza un sistema estándar de marcado de los cables de los sensores de inductancia, que todos los fabricantes de dispositivos sensibles cumplen sin excepción. Sin embargo, antes de instalarlos, se recomienda observar cuidadosamente la polaridad de la conexión y asegurarse de revisar las instrucciones suministradas con los productos.
Todos los sensores tienen un dibujo de alambre codificado por colores en sus carcasas, si el tamaño lo permite.
Orden estándar de designación:
- azul (azul) siempre significa carril de alimentación negativo;
- el color marrón (marrón) denota un conductor positivo;
- negro (negro) corresponde a la salida del sensor;
- El blanco es una salida o entrada auxiliar.
Para aclarar la última marca, debe cotejarse con los datos de las instrucciones adjuntas al dispositivo específico.
Errores de sensor

El error al tomar lecturas por parte del sistema de control afecta significativamente el funcionamiento del sensor inductivo sin contacto. Su valor total se obtiene de los errores de medición individuales para varios indicadores: electromagnético, temperatura, hardware, elasticidad magnética y muchos otros.
El error electromagnético se define como una cantidad que ocurre aleatoriamente. Aparece debido a un EMF parásito inducido en la bobina por campos magnéticos externos. En un entorno de producción, este componente se crea mediante equipos de potencia con una frecuencia de funcionamiento de 50 Hertz. El error de temperatura es uno de los indicadores más importantes, ya que la mayoría de los sensores solo pueden funcionar en un cierto rango de temperatura. Debe tenerse en cuenta al diseñar dispositivos de esta clase.
El error de elasticidad magnética se introduce como indicador de la inestabilidad de las deformaciones del núcleo que se produce durante el montaje del dispositivo, así como el mismo factor, pero se manifiesta durante su funcionamiento. La inestabilidad de los voltajes internos en el circuito magnético conduce a errores en el procesamiento de la señal de salida. El error que se produce en el dispositivo más sensible aparece debido a la influencia de la estructura del campo sobre el coeficiente de deformación de los elementos metálicos del sensor. Además, su valor total se ve afectado significativamente por el juego y las holguras en las partes móviles de la estructura.
El error del cable de conexión se toma de las desviaciones del valor de resistencia de sus núcleos de alambre en función del factor de temperatura, así como de la inducción de campos electromagnéticos extraños y EMF. El error de la galga extensométrica como variable aleatoria depende de la calidad de fabricación de los elementos de bobinado del sensor (su bobina, en particular). En diversas condiciones de funcionamiento, es posible un cambio en la resistencia de CC del devanado, lo que lleva a la "flotación" de la señal de salida. El error de envejecimiento se manifiesta por el desgaste de los elementos móviles del sensor, así como por cambios en las propiedades electromagnéticas del circuito magnético.
Es posible verificar el valor real de este parámetro solo con la ayuda de instrumentos de medición ultraprecisos. En este caso, se deben tener en cuenta las características cinemáticas del propio sensor. A la hora de diseñar y fabricar elementos sensibles, esta posibilidad se tiene en cuenta de antemano en su diseño.
Los sensores inductivos y capacitivos se caracterizan por modos de funcionamiento con muchos factores de influencia determinados por condiciones de funcionamiento específicas. Es por eso que la elección de la sensibilidad y un conjunto de parámetros de salida adecuados para una marca determinada de dispositivo es decisiva a la hora de utilizarlo como final de carrera.







