Sensor induktansi tanpa kontak diposisikan sebagai sensor yang mampu bertindak balas terhadap objek logam yang terperangkap dalam medan elektromagnetiknya. Berkat sifat sensor jarak induktif ini, mungkin untuk mengesan pergerakan bahagian peralatan yang bergerak dan, jika perlu, matikan motor mekanisme pemacu. Untuk mengenali dan menganalisis perubahan dalam medan magnet, unit elektronik khas yang disebut pengawal (pembanding) diperkenalkan ke dalam komposisi mereka.
Peranti dan prinsip operasi

Sensor kedudukan induksi, selain pembanding elektronik, mengandungi komponen wajib berikut:
- sarung keluli dengan penyambung untuk kabel penyambung;
- elemen sensitif terbina dalam yang mencatat perubahan dalam medan magnet dibuat dalam bentuk teras keluli dengan gegelung;
- modul geganti eksekutif;
- penunjuk pengaktifan pada LED.
Reka bentuk model sensor logam yang berbeza mungkin mempunyai beberapa perbezaan. Mereka tidak mempengaruhi sensor aruhan itu sendiri, prinsip operasinya tidak berubah dari ini.

Sesuai dengan alat peranti, inti dari operasinya dijelaskan seperti berikut:
- menggerakkan bahagian logam objek terkawal membawa kepada perubahan induktansi elemen sensitif sensor;
- penyimpangan dijelaskan oleh herotan medan magnetnya, yang mengakibatkan perubahan parameter litar elektrik dan pengaktifannya (LED menyala);
- selepas itu, modul elektronik dicetuskan dan menghantar isyarat ke peranti eksekutif;
- apabila dorongan diterima kira-kira melebihi had yang dibenarkan oleh pergerakan, nod output (relay) memutuskan peralatan yang dipantau dari rangkaian.
Setiap model mempunyai kepekaan gerakannya sendiri - jurang ofset. Untuk sampel yang berbeza, parameter ini berbeza dari 1 mikron hingga 20 milimeter.
Parameter sensor induktif

Sebagai tambahan kepada jarak respons atau kepekaan, sensor induktif dicirikan oleh petunjuk prestasi berikut:
- Ukuran (diameter) benang pendaratan, untuk pelbagai sampel, mengambil nilai dari 8 hingga 30 mm.
- Voltan bekalan dinilai pada suhu tambah 20 darjah, hingga 90 Volt DC dan hingga 230 Volt - arus AC.
- Panjang badan keseluruhan - nilainya bergantung pada voltan operasi.
Petunjuk terakhir untuk sampel yang berbeza dapat berbeza dengan ketara.
Untuk zon sensitif atau aktif peranti, parameter lain diperkenalkan, yang disebut had tindak balas terjamin. Had bawahnya adalah sifar, dan yang paling atas adalah 80 peratus dari nilai nominal. Penunjuk ini kadang-kadang dipanggil faktor pembetulan pelepasan kerja.
Petunjuk yang sama pentingnya fungsi peranti sensitif ialah bilangan wayar penyambung di penyambung. Biasanya terdapat dua atau tiga daripadanya: dua bekalan dan satu untuk mengaktifkan litar. Walau bagaimanapun, pilihan sambungan adalah mungkin, kerana susunan empat atau lima titik hubungan digunakan. Sampel serupa, selain dua konduktor bekalan, mengandungi dua output untuk beban. Dalam kes ini, konduktor kelima digunakan untuk memilih mod operasi peranti itu sendiri.
Jenis output dan kaedah sambungan
Untuk menilai tindakan peranti sensitif, ciri khas diperkenalkan, dinilai oleh keadaan polaritas parameter outputnya. Sesuai dengan sebutan elemen semikonduktor (transistor) yang diterima umum yang termasuk dalam litar elektronik sensor, output ini disebut "PNP" dan "NPN".
Perbezaan antara nama-nama ini adalah bahawa mereka menunjukkan polariti yang berbeza (tiang) dari bekalan kuasa peranti sensitif. Transistor PNP menukar output positifnya, dan NPN - negatif. Beban litar output selalunya mikropemproses kawalan.
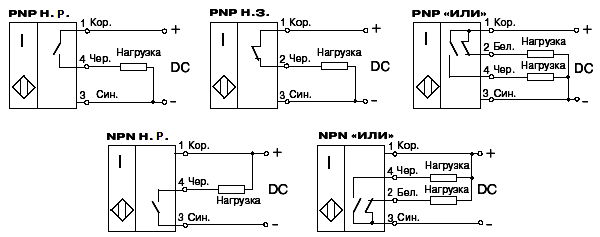
Bergantung pada skema kawalan pengawal, sensor induktif ditetapkan sebagai HO (biasanya terbuka) atau HZ - dengan input tertutup biasanya.
Pilihan transistor NPN adalah cara yang paling biasa untuk menghidupkan sensor, kerana litar standard menjadikan wayar negatif menjadi biasa bagi semua komponen. Dalam kes ini, input mikropemproses dan alat pemantauan lain diaktifkan dengan voltan positif.
Penandaan sambungan
Pada diagram skematik, sensor induktif biasanya dilambangkan sebagai rombus atau segi empat dengan dua garis menegak di dalamnya. Selalunya mereka juga menunjukkan jenis output (biasanya terbuka atau tertutup), sesuai dengan salah satu jenis transistor semikonduktor. Sebilangan besar pilihan litar menunjukkan kumpulan tertutup biasanya atau kedua-dua jenis di tempat yang sama.
Pengekodan warna plumbum

Dalam praktiknya, sistem standard menandakan petunjuk sensor induktansi digunakan, yang dipatuhi oleh semua pengeluar peranti sensitif tanpa kecuali. Walaupun begitu, sebelum memasangnya, disarankan untuk memerhatikan polaritas sambungan dengan teliti dan pastikan anda memeriksa arahan yang diberikan bersama produk.
Semua sensor mempunyai wayar berkod warna yang melukis di kediamannya, jika ukurannya memungkinkan.
Susunan standard:
- biru (Biru) selalu bermaksud rel kuasa negatif;
- warna coklat (Brown) menunjukkan konduktor positif;
- hitam (Hitam) sepadan dengan output sensor;
- Putih adalah output atau input tambahan.
Untuk menjelaskan penandaan penandaan terakhir, ia harus diperiksa berdasarkan data arahan yang dilampirkan pada peranti tertentu.
Kesalahan sensor

Kesalahan dalam pembacaan oleh sistem kawalan sangat mempengaruhi operasi sensor induktif tanpa sentuhan. Nilai keseluruhannya dikumpulkan dari kesilapan pengukuran individu untuk pelbagai petunjuk: elektromagnetik, suhu, perkakasan, keanjalan magnet dan banyak lagi.
Kesalahan elektromagnetik ditakrifkan sebagai kuantiti yang berlaku secara rawak. Ia muncul kerana EMF parasit yang disebabkan oleh gegelung oleh medan magnet luaran. Dalam persekitaran pengeluaran, komponen ini dibuat oleh peralatan kuasa dengan frekuensi operasi 50 Hertz. Kesalahan suhu adalah salah satu petunjuk yang paling penting, kerana kebanyakan sensor hanya dapat berfungsi dalam julat suhu tertentu. Ia mesti diambil kira semasa merancang peranti kelas ini.
Kesalahan keanjalan magnetik diperkenalkan sebagai petunjuk ketidakstabilan ubah bentuk teras yang berlaku semasa pemasangan peranti, dan juga faktor yang sama, tetapi menampakkan dirinya semasa beroperasi. Ketidakstabilan voltan dalaman dalam litar magnet menyebabkan kesilapan dalam pemprosesan isyarat output. Kesalahan yang berlaku pada peranti yang paling sensitif muncul kerana pengaruh struktur medan pada pekali ubah bentuk elemen logam sensor. Di samping itu, nilai keseluruhannya dipengaruhi secara signifikan oleh serangan balik dan pelepasan pada bahagian struktur yang bergerak.
Kesalahan kabel penyambung diambil dari penyimpangan nilai rintangan teras wayarnya bergantung pada faktor suhu, serta induksi medan elektromagnetik luar dan EMF. Kesalahan pengukur tegangan sebagai pemboleh ubah rawak bergantung pada kualiti pembuatan elemen penggulungan sensor (gegelungnya, khususnya). Dalam pelbagai keadaan operasi, perubahan rintangan DC penggulungan adalah mungkin, yang menyebabkan "terapung" isyarat output. Kesalahan penuaan ditunjukkan oleh kehausan elemen bergerak sensor, serta perubahan sifat elektromagnetik litar magnet.
Adalah mungkin untuk memeriksa nilai sebenar parameter ini hanya dengan bantuan alat ukur ultra-tepat. Dalam kes ini, ciri kinematik sensor itu sendiri mesti diambil kira. Semasa merancang dan membuat elemen sensitif, kemungkinan ini diambil kira terlebih dahulu dalam reka bentuknya.
Sensor induktif dan kapasitif dicirikan oleh mod operasi dengan banyak faktor mempengaruhi ditentukan oleh keadaan operasi tertentu. Itulah sebabnya pemilihan kepekaan dan sekumpulan parameter output yang sesuai untuk jenama peranti tertentu adalah menentukan ketika menggunakannya sebagai pengalih had.







