De contactloze inductiesensor is gepositioneerd als een sensor die kan reageren op metalen voorwerpen die in het elektromagnetische veld worden gevangen. Dankzij deze eigenschap van inductieve naderingssensoren is het mogelijk om de beweging van bewegende delen van de apparatuur te volgen en, indien nodig, de motor van het aandrijfmechanisme uit te schakelen. Om veranderingen in het magnetische veld te herkennen en te analyseren, wordt een speciale elektronische eenheid, een controller (comparator) genoemd, in hun samenstelling geïntroduceerd.
Apparaat en werkingsprincipe

Inductiepositiesensoren bevatten naast een elektronische comparator de volgende verplichte componenten:
- stalen kast met connector voor aansluitsnoer;
- een ingebouwd gevoelig element dat veranderingen in het magnetische veld registreert, wordt gemaakt in de vorm van een stalen kern met een spoel;
- uitvoerende relaismodule;
- activeringsindicator op de LED.
Het ontwerp van verschillende modellen metalen sensoren kan enkele verschillen hebben. Ze hebben geen invloed op de inductiesensor zelf, het principe van zijn werking verandert hier niet van.

In overeenstemming met het apparaat van het apparaat, wordt de essentie van zijn werking als volgt beschreven:
- het verplaatsen van het metalen deel van het bestuurde object leidt tot een verandering in de inductantie van het gevoelige element van de sensor;
- de afwijking wordt verklaard door de vervorming van het magnetische veld, met als resultaat een verandering in de parameters van het elektrische circuit en de activering ervan (de LED gaat branden);
- daarna wordt de elektronische module geactiveerd en stuurt een signaal naar het uitvoerende apparaat;
- wanneer een puls wordt ontvangen over het overschrijden van de toegestane limiet door beweging, ontkoppelt het uitgangs (relais) knooppunt de bewaakte apparatuur van het netwerk.
Elk model heeft zijn eigen bewegingsgevoeligheid - offset gap. Voor verschillende monsters varieert deze parameter van 1 micron tot 20 millimeter.
Inductieve sensorparameters:

Naast het responsbereik of de gevoeligheid wordt een inductieve sensor gekenmerkt door de volgende prestatie-indicatoren:
- De maat (diameter) van de landingsdraad, voor verschillende monsters, met waarden van 8 tot 30 mm.
- Nominale voedingsspanning bij een temperatuur van plus 20 graden, tot 90 Volt DC en tot 230 Volt - wisselstroom.
- Totale lichaamslengte - de waarde ervan hangt af van de bedrijfsspanning.
De laatste indicator voor verschillende monsters kan aanzienlijk variëren.
Voor de gevoelige of actieve zone van het apparaat wordt een andere parameter geïntroduceerd, de gegarandeerde responslimiet. De ondergrens is nul en de bovenste is 80 procent van de nominale waarde. Dit cijfer wordt soms de werkklaringscorrectiefactor genoemd.
Een even belangrijke indicator van de functionaliteit van een gevoelig apparaat is het aantal aansluitdraden in de connector. Meestal zijn het er twee of drie: twee leveren en één voor het activeren van het circuit. Er zijn echter aansluitmogelijkheden mogelijk in de opstelling waarbij gebruik wordt gemaakt van vier of vijf contactpunten. Soortgelijke monsters bevatten naast twee voedingsgeleiders twee uitgangen naar de belasting. In dit geval wordt de vijfde geleider gebruikt om de bedrijfsmodus van het apparaat zelf te selecteren.
Soorten uitgangen en verbindingsmethoden
Om de werking van een gevoelig apparaat te beoordelen, wordt een speciaal kenmerk geïntroduceerd, geëvalueerd door de status van de polariteit van de uitgangsparameters. In overeenstemming met de algemeen aanvaarde aanduiding van halfgeleiderelementen (transistoren) die in het elektronische circuit van de sensor zijn opgenomen, worden deze uitgangen "PNP" en "NPN" genoemd.
Het verschil tussen deze namen is dat ze verschillende polariteiten (polen) van de voeding van gevoelige apparaten aanduiden. PNP-transistoren schakelen de positieve uitgang en NPN - negatief. De belasting van de uitgangscircuits is meestal de besturingsmicroprocessor.
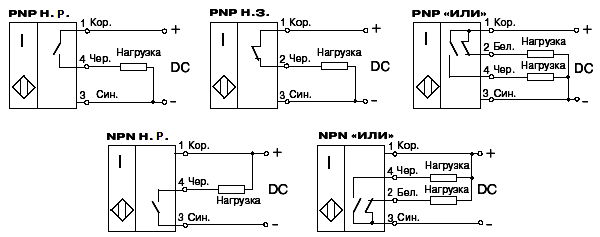
Afhankelijk van het regelschema van de controller worden inductieve sensoren aangeduid als HO (normaal open) of HZ - met een normaal gesloten ingang.
De NPN-transistoroptie is de meest gebruikelijke manier om de sensor in te schakelen, omdat standaardschakelingen de negatieve draad voor alle componenten gemeenschappelijk maken. In dit geval worden de ingangen van microprocessors en andere bewakingsapparatuur geactiveerd met een positieve spanning.
Verbindingsmarkering
Op schematische diagrammen worden inductieve sensoren meestal aangeduid als een ruit of vierkant met twee verticale lijnen erin. Vaak geven ze ook het type uitgang aan (normaal open of gesloten), overeenkomend met een van de soorten halfgeleidertransistors. De meeste circuitopties geven een normaal gesloten groep aan of beide typen in dezelfde behuizing.
Kleurcodering van lood

In de praktijk wordt een standaardsysteem voor het markeren van de draden van inductiesensoren gebruikt, dat zonder uitzondering door alle fabrikanten van gevoelige apparaten wordt nageleefd. Desalniettemin is het raadzaam om, voordat u ze installeert, de polariteit van de aansluiting zorgvuldig te observeren en de instructies die bij de producten worden geleverd te controleren.
Alle sensoren hebben een kleurgecodeerde draadtekening op hun behuizing, als de grootte dit toelaat.
Standaardvolgorde van aanduiding:
- blauw (Blauw) betekent altijd negatieve stroomrail;
- bruine kleur (bruin) geeft een positieve geleider aan;
- zwart (zwart) komt overeen met de sensoruitgang;
- Wit is een hulpuitgang of -ingang.
Om de laatste markeringsaanduiding te verduidelijken, moet deze worden gecontroleerd aan de hand van de gegevens van de instructies die bij het specifieke apparaat zijn gevoegd.
Sensorfouten

De fout bij het nemen van metingen door het besturingssysteem heeft een aanzienlijke invloed op de werking van de contactloze inductieve sensor. De totale waarde wordt verzameld uit individuele meetfouten voor verschillende indicatoren: elektromagnetisch, temperatuur, hardware, magnetische elasticiteit en vele andere.
Elektromagnetische fout wordt gedefinieerd als een willekeurig optredende grootheid. Het lijkt te wijten aan een parasitaire EMF die in de spoel wordt geïnduceerd door externe magnetische velden. In een productieomgeving wordt dit onderdeel gemaakt door stroomapparatuur met een werkfrequentie van 50 Hertz. Temperatuurfout is een van de belangrijkste indicatoren, omdat de meeste sensoren alleen in een bepaald temperatuurbereik kunnen werken. Hiermee moet rekening worden gehouden bij het ontwerpen van apparaten van deze klasse.
De fout van magnetische elasticiteit wordt geïntroduceerd als een indicator van de instabiliteit van de kernvervormingen die optreden tijdens de montage van het apparaat, evenals dezelfde factor, maar manifesteert zich tijdens de werking ervan. De instabiliteit van interne spanningen in het magnetische circuit leidt tot fouten in de verwerking van het uitgangssignaal. De fout die optreedt in het meest gevoelige apparaat lijkt te wijten aan de invloed van de veldstructuur op de vervormingscoëfficiënt van de metalen elementen van de sensor. Bovendien wordt de totale waarde aanzienlijk beïnvloed door speling en spelingen in de bewegende delen van de constructie.
De fout van de verbindingskabel wordt afgeleid uit de afwijkingen van de weerstandswaarde van de draadkernen, afhankelijk van de temperatuurfactor, evenals de inductie van externe elektromagnetische velden en EMF. De rekstrookfout als willekeurige variabele hangt af van de fabricagekwaliteit van de wikkelelementen van de sensor (met name de spoelen). Onder verschillende bedrijfsomstandigheden is een verandering in de DC-weerstand van de wikkeling mogelijk, wat leidt tot het "zweven" van het uitgangssignaal. De verouderingsfout manifesteert zich als gevolg van de slijtage van de bewegende elementen van de sensor, evenals veranderingen in de elektromagnetische eigenschappen van het magnetische circuit.
Het is alleen mogelijk om de werkelijke waarde van deze parameter te controleren met behulp van ultranauwkeurige meetinstrumenten. In dit geval moet rekening worden gehouden met de kinematische kenmerken van de sensor zelf. Bij het ontwerpen en vervaardigen van gevoelige elementen wordt bij het ontwerp vooraf met deze mogelijkheid rekening gehouden.
Inductieve en capacitieve sensoren worden gekenmerkt door bedrijfsmodi met veel beïnvloedende factoren die worden bepaald door specifieke bedrijfsomstandigheden. Dat is de reden waarom de keuze van de gevoeligheid en een set uitgangsparameters die geschikt zijn voor een bepaald merk apparaat bepalend zijn bij gebruik als eindschakelaar.







