Den berøringsløse induktansføleren er plassert som en sensor som kan reagere på metallgjenstander fanget i det elektromagnetiske feltet. Takket være denne egenskapen til induktive nærhetssensorer er det mulig å spore bevegelsen til bevegelige deler av utstyret og om nødvendig slå av motoren til drivmekanismen. For å gjenkjenne og analysere endringer i magnetfeltet introduseres en spesiell elektronisk enhet kalt en kontroller (komparator) i sammensetningen.
Enhet og driftsprinsipp

Induksjonsposisjonssensorer, i tillegg til en elektronisk komparator, inneholder følgende obligatoriske komponenter:
- stålveske med kontakt for tilkobling av ledning;
- et innebygd følsomt element som registrerer endringer i magnetfeltet er laget i form av en stålkjerne med en spole;
- leder stafett modul;
- aktiveringsindikator på lysdioden.
Utformingen av forskjellige modeller av metallsensorer kan ha noen forskjeller. De påvirker ikke selve induksjonsføleren, prinsippet om dens drift endres ikke fra dette.

I samsvar med enhetens enhet er essensen av dens drift beskrevet som følger:
- å flytte metalldelen av den kontrollerte gjenstanden fører til en endring i induktansen til det følsomme elementet i sensoren;
- avviket forklares av forvrengningen av magnetfeltet, hvis resultat er en endring i parametrene til den elektriske kretsen og dens aktivering (LED lyser);
- etter det blir den elektroniske modulen utløst og sender et signal til den utøvende enheten;
- når en puls mottas omtrent overskridelse av den tillatte grensen ved bevegelse, kobler utgangs (relé) noden det overvåkede utstyret fra nettverket.
Hver modell har sin egen bevegelsesfølsomhet - forskyvet gap. For forskjellige prøver varierer denne parameteren fra 1 mikron til 20 millimeter.
Induktive sensorparametere

I tillegg til responsområdet eller følsomheten, er en induktiv sensor preget av følgende ytelsesindikatorer:
- Størrelsen (diameteren) på landingstråden, for forskjellige prøver, med verdier fra 8 til 30 mm.
- Nominell forsyningsspenning ved en temperatur på pluss 20 grader, opp til 90 Volt DC og opptil 230 Volt - vekselstrøm.
- Total kroppslengde - verdien avhenger av driftsspenningen.
Sistnevnte indikator for forskjellige prøver kan variere betydelig.
For den følsomme eller aktive sonen til enheten introduseres en annen parameter, kalt den garanterte responsgrensen. Den nedre grensen er null, og den øvre er 80 prosent av den nominelle verdien. Denne indikatoren kalles noen ganger korrigeringsfaktoren for arbeidsklarering.
En like viktig indikator på funksjonaliteten til en sensitiv enhet er antall tilkoblingsledninger i kontakten. Vanligvis er det to eller tre av dem: to forsyninger og en for å aktivere kretsen. Imidlertid er tilkoblingsmuligheter mulige i arrangementet der fire eller fem kontaktpunkter brukes. Lignende prøver inneholder, i tillegg til to forsyningsledere, to utganger til lasten. I dette tilfellet brukes den femte lederen til å velge driftsmodus for selve enheten.
Typer utganger og tilkoblingsmetoder
For å vurdere virkningen av en sensitiv enhet introduseres en spesiell karakteristikk, evaluert av tilstanden til polariteten til utgangsparametrene. I samsvar med den generelt aksepterte betegnelsen av halvlederelementer (transistorer) inkludert i sensorens elektroniske krets, kalles disse utgangene "PNP" og "NPN".
Forskjellen mellom disse navnene er at de betegner forskjellige polariteter (poler) av strømforsyningen til sensitive enheter. PNP-transistorer bytter positiv effekt, og NPN - negativ. Belastningen på utgangskretsene er oftest kontrollmikroprosessoren.
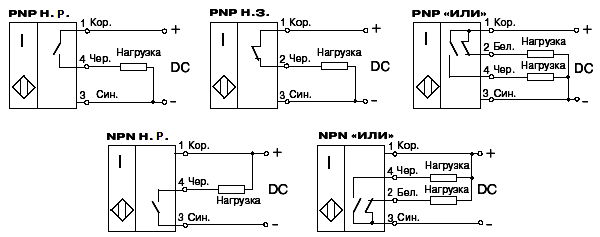
Avhengig av kontrollskjemaet til kontrolleren, er induktive sensorer betegnet som HO (normalt åpen) eller HZ - med en normalt lukket inngang.
NPN-transistoralternativet er den vanligste måten å slå på sensoren, da standard kretsløp gjør den negative ledningen felles for alle komponenter. I dette tilfellet aktiveres inngangene til mikroprosessorer og andre overvåkingsenheter med en positiv spenning.
Tilkoblingsmerking
På skjematiske diagrammer blir induktive sensorer vanligvis betegnet som en rombe eller firkant med to vertikale linjer inni. Ofte indikerer de også typen utgang (normalt åpen eller lukket), tilsvarende en av variantene av halvledertransistorer. De fleste kretsalternativene indikerer en normalt lukket gruppe eller begge typer i samme hus.
Bly fargekoding

I praksis brukes et standard system for merking av ledningene til induktanssensorer, som følges av alle produsenter av følsomme enheter uten unntak. Likevel, før du installerer dem, anbefales det å følge polariteten til tilkoblingen nøye og kontrollere instruksjonene som følger med produktene.
Alle sensorer har en fargekodet ledningstegning på huset, hvis størrelsen tillater det.
Standard rekkefølge for betegnelse:
- blå (blå) betyr alltid negativ motorskinne;
- brun farge (brun) betegner en positiv leder;
- svart (svart) tilsvarer sensorutgangen;
- Hvitt er en ekstra utgang eller inngang.
For å klargjøre den siste merkingen, bør den sjekkes mot dataene i instruksjonene som er festet til den spesifikke enheten.
Sensorfeil

Feilen ved avlesning av kontrollsystemet påvirker driften av den berøringsfri induktive sensoren betydelig. Dens totale verdi samles fra individuelle målefeil for forskjellige indikatorer: elektromagnetisk, temperatur, maskinvare, magnetisk elastisitet og mange andre.
Elektromagnetisk feil er definert som en tilfeldig forekommende mengde. Det vises på grunn av en parasittisk EMF indusert i spolen av eksterne magnetfelt. I et produksjonsmiljø er denne komponenten opprettet av kraftutstyr med en driftsfrekvens på 50 Hertz. Temperaturfeil er en av de viktigste indikatorene, siden de fleste sensorer bare kan fungere i et bestemt temperaturområde. Det må tas i betraktning når du designer enheter i denne klassen.
Feilen med magnetisk elastisitet introduseres som en indikator på ustabiliteten til kjernedeformasjonene som oppstår under montering av enheten, så vel som den samme faktoren, men manifesterer seg under drift. Ustabiliteten til interne spenninger i magnetkretsen fører til feil i behandlingen av utgangssignalet. Feilen som oppstår i den mest følsomme enheten vises på grunn av innvirkningen av feltstrukturen på deformasjonskoeffisienten til metallelementene til sensoren. I tillegg er den totale verdien betydelig påvirket av tilbakeslag og klareringer i de bevegelige delene av strukturen.
Feilen til tilkoblingskabelen er hentet fra avvikene fra motstandsverdien til ledningskjernene, avhengig av temperaturfaktoren, samt induksjon av fremmede elektromagnetiske felt og EMF. Strekkmålerfeilen som en tilfeldig variabel avhenger av produksjonskvaliteten til sensorens viklingselementer (spesielt dens spole). Under forskjellige driftsforhold er det mulig å endre likestrømsmotstanden til viklingen, noe som fører til "flyt" av utgangssignalet. Aldringsfeil manifesteres på grunn av slitasje på sensorens bevegelige elementer, samt endringer i magnetkretsens elektromagnetiske egenskaper.
Det er mulig å kontrollere den virkelige verdien av denne parameteren bare ved hjelp av ultra-presise måleinstrumenter. I dette tilfellet må de kinematiske egenskapene til selve sensoren tas i betraktning. Når du designer og produserer sensitive elementer, blir denne muligheten tatt i betraktning på forhånd i utformingen.
Induktive og kapasitive sensorer er preget av driftsmåter med mange påvirkningsfaktorer, bestemt av spesifikke driftsforhold. Derfor er valg av følsomhet og et sett med utgangsparametere som er egnet for et gitt merke av enhet avgjørende når du bruker det som grensebryter.







